
發布時間:2013-09-16 09:02:13點擊數:2098次
在低溫光學系統內建立兩級溫區是紅外弱目標雙波段探測的基礎和關鍵, 采用氦氣壓縮式制冷技術, 通過精密的結構、熱、光學設計和分析, 實現了低溫光學系統內兩個低溫溫區的隔離與建立, 一級溫區8 0 ~1 0 0 K , 二級溫區4 0 ~8 0 K , 控溫精度±0 . 5 K , 溫區內最大溫差2 . 4 K , 兩溫區獨立控溫、互不干擾, 克服了國內低溫光學研究受液氮制冷對溫度和使用條件的限制, 使國內低溫光學的研究達到了具有更低工作溫度和雙溫區同時工作的水平。
降低紅外探測光學系統的溫度, 可明顯減少系統內部熱輻射, 降低探測器背景噪聲, 有效提高系統探測能力和靈敏度。隨著航天事業及紅外探測技術的發展, 探測目標溫度的降低, 要求紅外探測系統的工作溫度更低, 同時也對探測系統提出了多波段探測的要求, 探測系統同時進行多波段的探測時, 由于不同波段受背景輻射的影響和探測器件低溫性能的不一致, 各波段探測需要在不同的低溫溫度下工作, 從而為低溫光學系統的研究提出了在系統內建立多級溫區的要求。
20 世紀90 年代我國研制成功的低溫光學系統,用液氮制冷, 溫度控制在100 K 左右, 只具有單一溫區。與單一溫區低溫光學系統相比, 兩級溫區系統的設計將更加復雜和難以控制, 不但要考慮同時將兩個溫區制冷到相應的低溫, 還要進行獨立的溫度控制, 避免相互干擾和影響。
為建立兩級溫區的低溫光學系統, 文中采用新型制冷技術, 通過精密的結構、熱、光學設計和分析, 實現了低溫光學系統內兩個低溫溫區的隔離與建立, 控溫精度分別達±0 . 5 K 和±0 . 2 K 。該設計克服了液氮制冷對低溫光學系統工作溫度和工作方向的制約, 提供給紅外探測更低的溫度和用兩級溫區進行探測的低溫條件, 將有效提高低溫光學系統紅外探測的探測能力和靈敏度, 為紅外目標的雙波段探測奠定了良好的基礎。
1、低溫光學系統兩級溫區的建立
1.1、實驗低溫光學系統的設計
根據通常紅外探測對中長波探測器工作溫度的要求, 進行了相應一級溫區 80~100 K, 二級溫區 40~80 K 低溫光學系統布置與設計, 可實現對紅外目標的成像或探測, 如圖 1 所示。
.jpg)
圖1 實驗光學系統布置圖
光線經離軸拋物鏡 M1、M2 組成縮束系統后, 被分光鏡 Spliter 分光, 分別通過離軸拋物鏡 M3、M4 聚焦在 HgCdTe 探測器 1 和 2 上。其中光學系統與中波探測器 1 均處于一級溫區, 而對背景輻射更敏感的長波探測器 2 則單獨處于工作溫度更低的二級溫區。
整個低溫光學系統被放置在一個真空低溫倉中,通過機械泵和低溫泵抽真空, 可使倉內真空度低于1×10- 4Pa, 減少內部對流, 抑制倉內外的熱交換, 保持倉內低溫和溫度平衡, 同時可以保持倉內清潔, 光學性能穩定。
1.2、系統低溫絕熱設計
低溫光學系統工作狀態下與真空低溫倉的溫差將大于 200 K, 同時一二級溫區間的溫差也將達到幾十 K, 必須進行有效的絕熱。
一級溫區與真空低溫倉間的絕熱設計如圖 2 所示, 熱隔離用低導熱率的高分子材料實現, 并采用了接觸面很小的錐面配合結構做支撐, 極大減小了系統漏熱率和漏熱截面積。同時由該設計組成的 3 點溝槽式向心支撐結構還具有高精度自動復位, 保持光學系統低溫視軸穩定的作用。低溫光學系統一二級溫區間的絕熱同樣采用低導熱率的高分子材料隔離實現。
.jpg)
圖2 一級溫區絕熱設計示意圖
1.3、系統低溫熱平衡狀態分析
在低溫光學系統兩個溫區的溫度已確定的情況下, 裝在真空低溫倉中, 經過適當的絕熱設計, 其低溫熱平衡就是一個確定的穩態換熱狀態。
由傳熱學理論可得系統低溫下一級溫區、二級溫區、真空低溫倉間的換熱關系, 如圖 3 所示。
.jpg)
圖3 低溫光學系統熱平衡熱流圖
由圖可見, 系統低溫熱平衡時, 一級溫區從真空低溫倉吸熱 5.23 W, 向二級溫區放熱 0.19 W, 向一級冷頭放熱 5.04 W, 從而達到平衡; 二級溫區從一級溫區吸熱 0.19 W, 真空低溫倉吸熱 1.21 W, 向二級冷頭放熱 1.40 W, 以達到平衡。
1.4、系統兩級溫區的制冷
由低溫熱平衡分析可知: 系統對制冷能力的要求為一級大于 5.04 W, 二級大于 1.40 W。通常液氮制冷能夠獲得的低溫僅為 80 K, 若同時進行兩個溫區的制冷, 系統會更復雜和難以控制。
采用兩級氦氣壓縮式制冷對系統兩級溫區進行制冷, 具有制冷溫度低、制冷功率大、分級制冷的特點, 其制冷功率一級在 77 K 時達 65 W, 二級在 20 K時達 7 W, 最低制冷溫度空載時, 一二級分別為 45、16 K, 滿足系統低溫要求。
系統兩個溫區與制冷機冷頭間的熱傳導采用銅帶作軟連接實現, 以避免制冷機工作時的振動和裝配時對光學系統的位置干擾, 如圖 4 所示。
.jpg)
圖4 制冷傳熱軟連接示意圖
經有限元優化設計, 使其在有足夠的導熱能力時仍保持一定的柔性。當冷頭與各溫區間存在 50 K 溫差時, 向一二級溫區最大傳熱量分別為 47.2 W 和 7.4 W。據此計算, 系統一級溫區降溫時間為 7.5 h, 二級溫區降溫時間為 3 h。
1.5、系統兩級溫區的溫控
制冷機一級冷頭的溫度在 45~320 K 之間任意可控, 故一級溫區的溫度控制是通過調節制冷機一級冷頭的溫度進行的。結合系統特點, 采用先粗調, 再微調的控溫方式, 理論控溫精度達±0.5 K。
二級溫區的控溫由于受制冷機二級冷頭控溫范圍的影響, 在高于 30 K 后不能控制, 故采用單獨加溫控儀控溫的方式, 采用雙傳感器、雙加熱器控溫, PID控溫精度達±0.5 K。
為避免低溫下各溫區內溫差過大引起系統變形,對系統一二級溫區控溫平衡后的溫度分布進行了有限元模擬, 如圖 5、圖 6 所示。
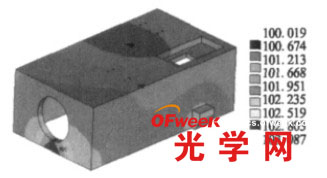
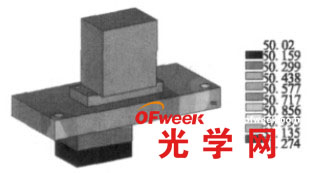
圖5 一級溫區10 0 K 低溫分布模擬 圖6 二級溫區50 K 低溫分布模擬
由圖可見, 降溫平衡后一級溫區內最大溫差僅 3.1 K 左右, 二級溫區內最大溫差僅為 1.3 K, 溫度梯度小于 0.08 K/cm, 溫度均勻性良好。經熱力學耦合分析, 在此溫度梯度下各溫區光學平臺的最大熱變形為 1.2 μm, 僅引起光學平臺傾 斜 0.38″,對系統成像質量的影響可以忽略。
2、低溫測試實驗結果與分析
根據設計與分析結果, 建立該兩級溫區低溫光學實驗系統, 結果如圖 7、圖 8 所示。
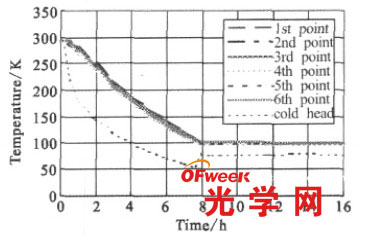
圖7 一級溫區低溫實驗結果
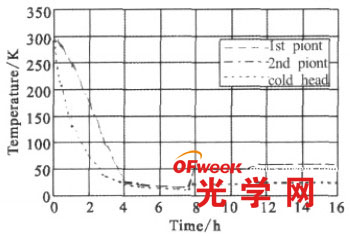
圖8 二級溫區低溫實驗結果
由圖 7 可見: 一級溫區制冷開始后約 7.8 h 降到102 K, 進入程序控溫, 溫度逐漸穩定在 99.5 K, 平衡后溫區內分布于各處的6個測溫點測量值分別在99.5、100.4、100.1、100.2、99.6、98.0 K 左右, 最大溫差2.4 K。
實驗結果顯示: 一級溫區的制冷能力和銅帶導熱能力適當、控溫合理, 7~8 h 后就能夠順利實現 80~100 K 的制冷與控溫。降溫時間與理論分析的 7.5 h較符合, 溫區內最大溫差 2.4 K, 小于有限元模擬結果 3.1 K, 具有良好的溫度均勻性。
由圖 8 可見: 二級溫區制冷開始后 3 h 即可降到50 K 以下, 啟動溫控后溫區內控溫點先后很快穩定在 50 K±0.1 K、60 K±0.1 K 內, 在控溫達到平衡時,溫區內 2 個測溫點溫差在 0. 5 K 以內。
實驗結果顯示: 二級溫區制冷能力足夠, 控溫及時準確, 3.5 h 后就能夠順利實現 40~80 K 的制冷與控溫, 具有良好的溫度均勻性。降溫時間與設計值3.2 h 稍有出入, 這是由于制冷機功率在高溫階段數據不確切造成的。
3、結 論
在低溫光學系統的研究中, 采用新型制冷技術,通過系統的結構、熱、光學設計和分析, 順利實現了低溫光學系統一級和二級兩級溫區的隔離與建立, 使國內低溫光學技術達到了液氮以下溫度和雙波段探測的低溫水平。
實驗結果表明: 系統性能穩定, 一級溫區能夠任意設定在 80~100 K, 控溫精度±0.5 K, 溫區內最大溫差 2.4 K, 滿足系統中波探測的要求; 二級溫區能夠任意設定在 40~80 K, 控溫精度±0.2 K, 溫區內最大溫差 0.5 K, 滿足系統長波探測的要求。在我國低溫紅外探測器在液氮氮點以下的性能測試數據缺乏的情況下, 將為進一步研究探測器和整個低溫光學系統的探測性能提供良好的條件。(作者:任棲鋒、沈忙作、廖 勝、譚述亮、韓維強)
微米是長度單位,符號 [micron],讀作[mi
光柵分為3D立體光柵,光柵尺,安全光柵,復制光柵,
冷加工與熱加工的區別是什么?冷加工通常指金屬的切削加工
光學冷加工工藝 第1道:銑磨,是去除鏡片表面凹
ps濾鏡怎么安裝?濾鏡主要是用來實現圖像的各種特殊效果
光密度(OD)[optical density]定義
濾光片主要特點是尺寸可做得相當大。薄膜濾光片,又分
減反射膜又稱增透膜、AR膜、AR片、減反射膜、AR
虹膜特征 眼睛的虹膜是由相當復
相信了解偏振鏡的朋友都知道其偏振鏡的作用,但是文字的說





